Sabina Kamińska
The integration of deep learning techniques into surgical robotics has opened up new possibilities for enhancing surgical procedures by automating repetitive and precise subtasks. This project aims to leverage deep learning algorithms to develop a viable solution for automating subtasks within the context of Minimally Invasive Surgery (MIS).
By automating recurring subtasks, surgeons can focus on critical decision-making and complex maneuvers, resulting in improved patient care.
This project focuses on training DRL algorithms in virtual environments, with the ultimate goal of transferring the learned policies to real-world surgical settings. By using virtual environments as a training ground, this project aims to accelerate the development of intelligent robotic systems capable of enhancing surgical outcomes and safety.
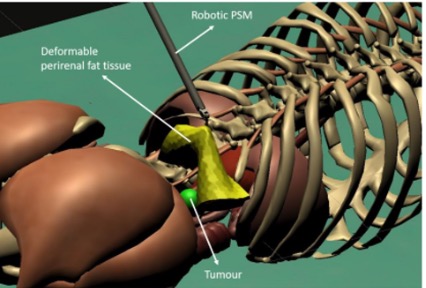
Figure: The virtual scene used to simulate the tissue retraction task during a partial nephrectomy procedure.
Source: https://ieeexplore.ieee.org/document/9636175.