Michał Motak
Robotic-assisted ultrasound imaging utilizes high precision robotic system to improve the acquisition of ultrasound images. Ultrasound examination requires highly skilled and experienced sonographers, thus automation can support this process by making it faster and less operator dependent.
The goal of the project is to create a robotic system for automated ultrasound examination which utilizes Reinforcement Learning in realistic virtual simulation environments for robotic trajectory learning. Subsequently, the trajectories learned will be transferred to a real environment by exploiting adaptation techniques based on user demonstrations and diffusion models to support generalization to new application contexts. Furthermore, deep learning computer vision methods will support decision making of the robot by analyzing ultrasound image in real time, directing it in the desired direction and allowing the automatic localization of anomalies (e.g. pathological areas).
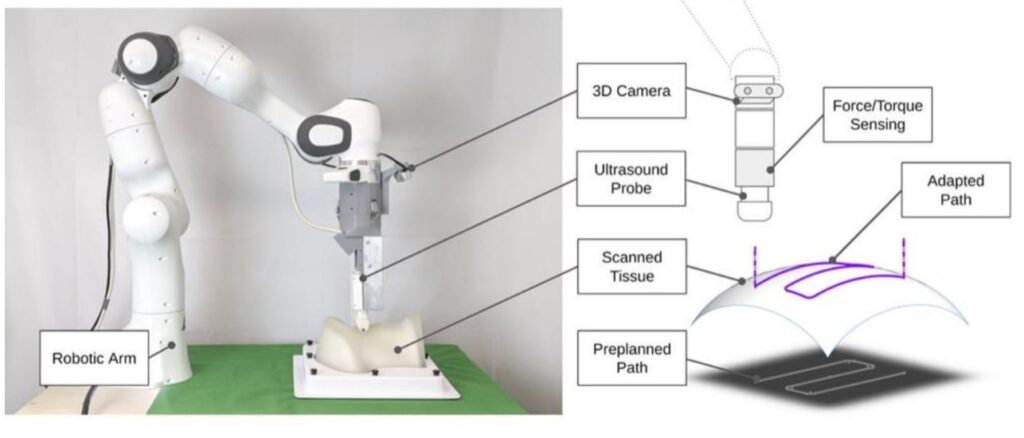
Figure: An example diagram of hardware and software modules of the RAUS system.
Source: Image courtesy of Kaminski JT et al. “Ultrasound Imaging with Force Feedback for Assessment of Thyroid Diseases” Proc SPIE Int Soc Opt Eng. 2020 doi: 10.1117/12.2551118.