Amanuel Ergogo
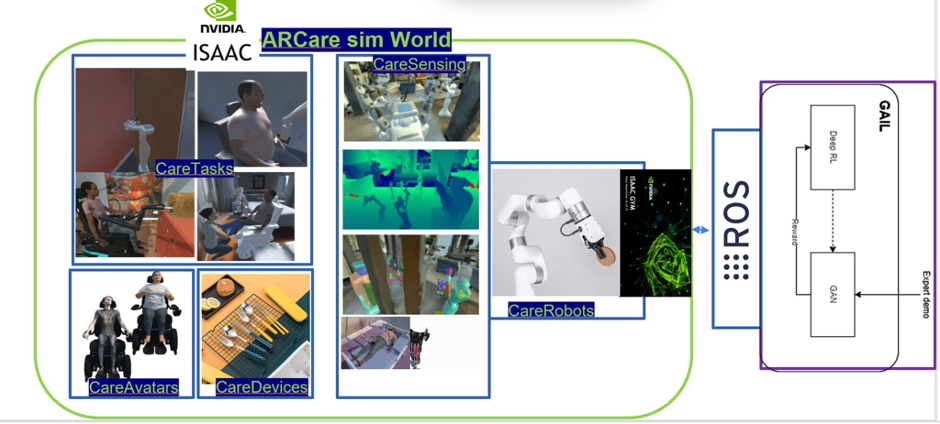
ARCare develops a robotic system which provides manipulation aid for hospitalized bedridden patients with activities of daily living such as feeding, object fetching and clothing. With a possibility of extending to situations, such as to assist nurses and caregivers with patient-centered tasks.
We aim to:
- Model and simulate scenarios for assistive robotic caregiving such as feeding, object fetching, and clothing tasks.
- Develop intelligent planning and control policies for assistive caregiving tasks by efficiently combining multimodal sensing and perception.
- Performance evaluation and sim-to-real transfer of learned control policies.
- Multi-task manipulation learning of assistive tasks for bedridden patient.
- User acceptance and perception of assistive robotic caregiving.